



















2. Basic operation
-----------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
2 - 8
2.2.1.3 Speed
Designate the speed of tool end. There are mm/sec, cm/min, sec, % etc n a unit. Sec designate
speed as moving time, % is the ratio base on maximum speed.
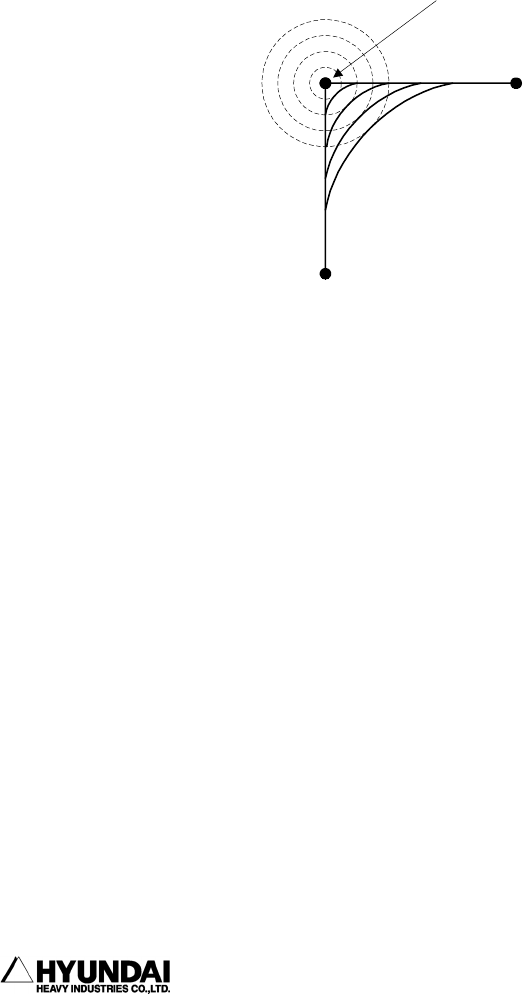
2.2.1.4 Accuracy
Decide precision to pass the step (approach grade to recorded position) when the robot follow
to recorded step. When the end of tool moves to object step, if the difference is
uniform(accuracy O.K) between present position and recorded position, the robot moves to next
step. Here, the difference is named accuracy. Accuracy 0 is most precision and accuracy 3
has the largest difference. This value can be defined in distance the number of bit at
“ System” [PF2] → 3: Machine parameter → 8: Accuracy.
2.2.1.5 Tool number
The position of robot is decided by the pose and position of tool end. Designate the number
of tool to be used.
2.2.1.6 Output option
G1, G2 - gun signal. - for spot welding.
MX1, MX2 - Maximum open. - for spot welding.
BM - block mark: At f key setting, speed 5% increase/decrease can be designated, when it if
only adapted to move command designated BM.
0
1
2
3
P1
P3
P2
Path of P2 accoring to accuracy