



















3. Service menu
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
----------------------------------------------------------------------------------------
3 - 18
3.2.2 Shift buffers
Outline
It is a parallel movement with keeping up the tool angle that already taught.
Screen display
Reference
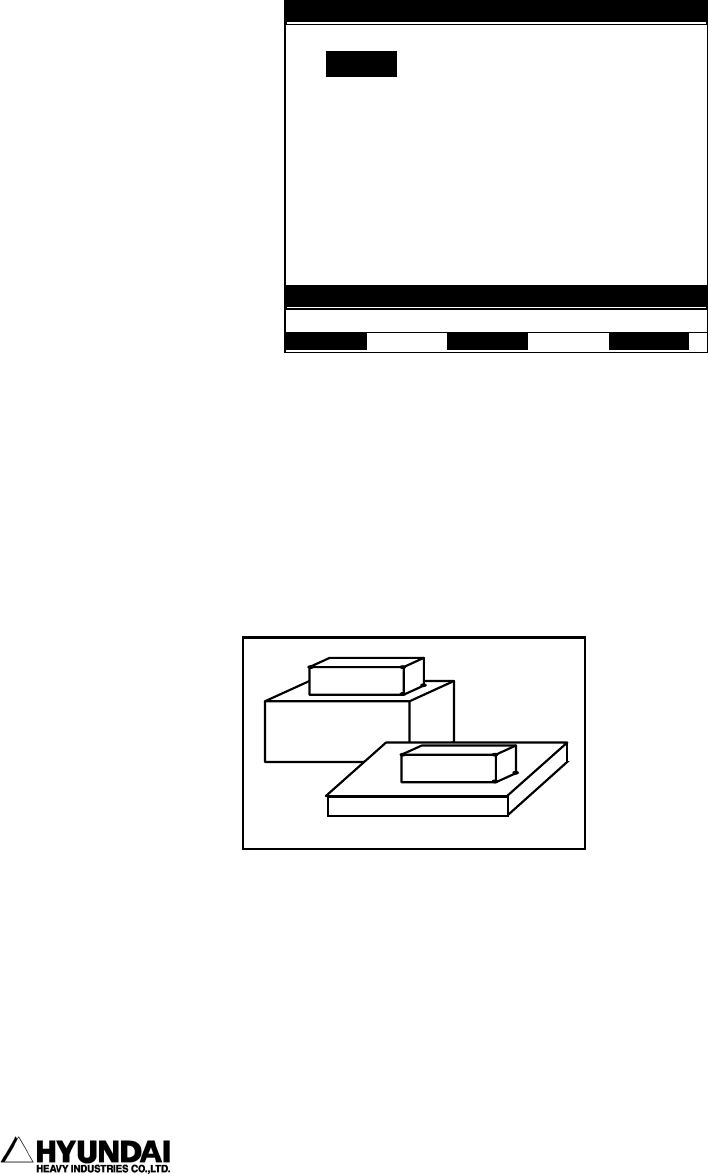
(1) Parallel movement shift
When the point of A, B, C, D and the points of a, b, c, d is a parallel movement
relationship between its two positions. If playback to a position of a, b, c and
d from the program of A, B, C and D with keeping up regularly the tool angle to a
extent of different between the point and the point A from the external.
(2) Angle calibration shift
A parallel movement shift is a parallel movement with preserving the tool angle but
an angle calibration shift make a shift while calibration correctly the tool angle
on the basis of a deviating angle in the robot coordination system from the external.
It can be playback regularly what is the tool angle for workpiece "A" is the point
"c" as is the tool angle for workpiece "a" to the point "c".
14:39:38 *** Re
g
ister *** A:0 S:4
1. Shift buffer for robot coordinate
X=[ 0.0] Y=[ 0.0] Z=[ 0.0]mm
AX=[ 0.00] AY=[ 0.00] AZ=[ 0.00]dg
2. Shift buffer for tool coordinate
X=[ 0.0] Y=[ 0.0] Z=[ 0.0]mm
AX=[ 0.00] AY=[ 0.00] AZ=[ 0.00]dg
Select and Enter number. Press
[
SET
]
>
[
-3000.0 - 3000.0
]
Complete
C
D
A
B
a
b
c
d