



















1. Safety, Operation Panel, Teach Pendant (1) Safety
------------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------
1 - 24
1.1.10. Safety Functions
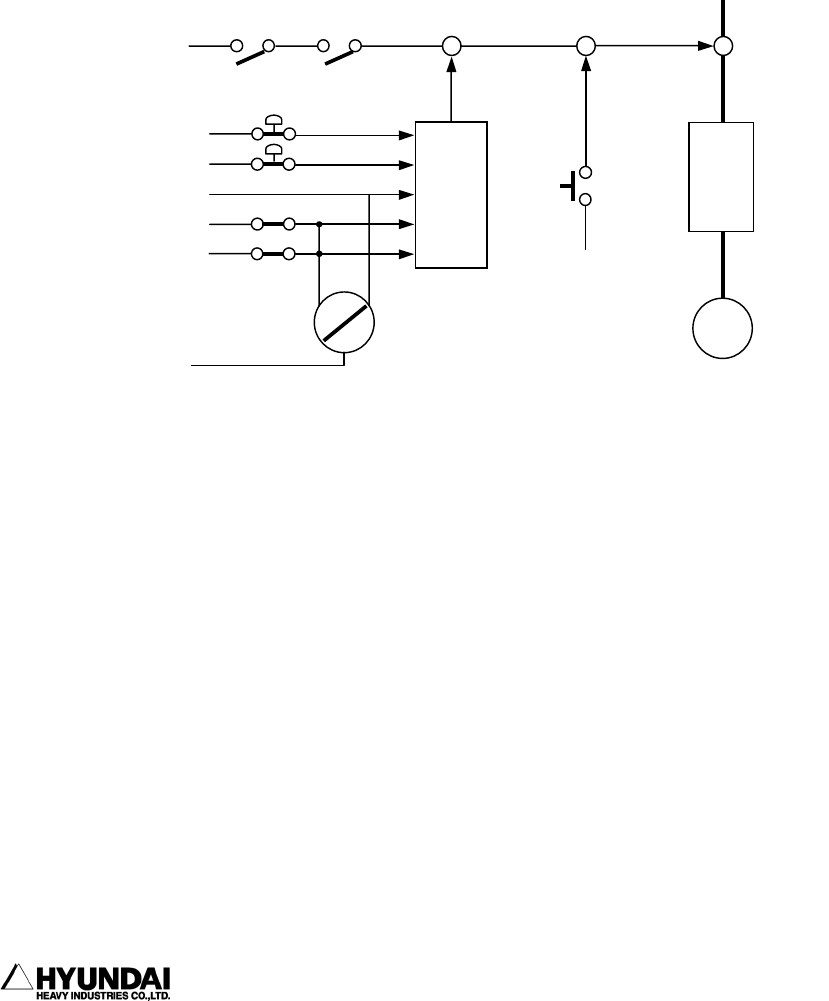
1.1.10.1 Safety Control Chain of Operation
The robot's safety system is based on a two-channel safety circuit that is
continuously monitored. If an error is detected, the power supply to the motors is
switched off and the brakes engage. To return the robot to MOTORS ON mode, the two
identical chains of switches must be closed. As long as these two chains differ, the
robot will remain in the MOTORS OFF mode. Furthermore, when safety cuicuit is
disconnected, interrupting call will be sent automatically to the Controller to find
out the reason for the interruption.
The safety control chain of operation is based on dual electrical safety chains which
interact with the robot controller and the MOTORS ON mode.
Electrical safety chain consist of several switches connected in such a way that all
of them must be closed before the robot can be set to MOTORS ON mode. MOTORS ON mode
means that drive power is supplied to the motors.
If any contact in the safety chain of operation is open, the robot always reverts
to MOTORS OFF mode. MOTORS OFF mode means that drive power is removed from the robot's
motors and the brakes are applied. MOTORS OFF mode means the status that there is
no power supply to motor of robot while brake of motor is woking. The status of the
switches is displayed on the teach pendant (Refer to the I/O monitoring screen of
Service Menu in Chapter 6).
Emergency A
Emergency B
Safe guard A
&
AUTO
Limit Switch
Arm
interference
Contactor
MOTORS ON
Motor
Drive
Unit
Safe guard B
MANUAL