



















6. System setting
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
6
- 50
Z축
Y축
X축
R1축중심
Zn
Yn
Y축
X축
Zn
Yn
Z축
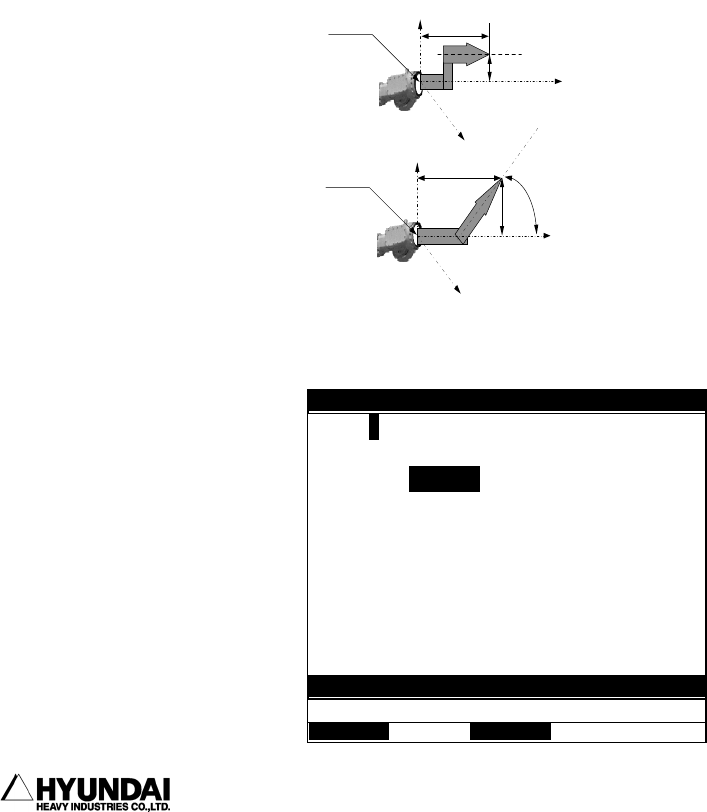
Tn: 툴각도(+방향)
R1축중심
6.3.1 Tool Data
Outline
You should register the length and angle of the tool. (Please register before teaching
work ) The robot does linear motion according to the setting length. The linear
coordination motion or fixing motion of the tool end do the linear interpolation motion
as you want if you must set the accurate value because the motion of the robot execute.
and also, the tool angle decides the direction of the motion in case of tool coordination
motion.
For example
The tool angle is the angle (Tn) of the end of the center of the R1 axis. as describing
in the below feature. ( n : Tool no. = 0 ∼ 3 ) The tool length is the length to each
axis direction in the end of the center of the R1 axis. ( n : Tool no. = 0 ∼ 3 )
(1)The length of X axis direction Xn (2) The length of Y axis direction Yn
(3)The length of Z axis direction Zn (4) Rotation angle for X axis Tn
Screen display
14:39:38 *** Tool data *** A:0 S:4
Tool 0 :::::::::::::::::::::::::::::::
Weight [ 120.0] kg
Component: X Y Z
Angle [ 0.0] [ 0.0] [ 0.0] deg
Length[ 0.0] [ 0.0] [ 0.00] mm
Inertia[ 0.00] [ 0.00] [ 0.0]kgm2
Center[ 0.0] [ 0.0] [ 0.0] mm
Use
[
Number
]/[
U
p][
Down
]
and
p
ress
[
SET
]
.
>
[
0 - 1000.0
]
AutoSETgAng SETgPrevious Next