



















6. System setting
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
6 - 71
6.4.1.2 Servo gun parameter
Outline
It is set to do the spot welding by using the servo gun.
The additional axis should be registered to the servo gun and in case of making out
the machine constant file, it is set to the initial value. If it is necessary, please
change it according to the gun or the welding method so forth.
Please refer to the servo gun function manual for more precise contents.
Screen display
In case of using the multi-gun, it should be set on two items of the first and second
servo gun parameter.
If advanced to the first servo gun parameter, the following screen is displayed.
▶ In case of selecting the next screen
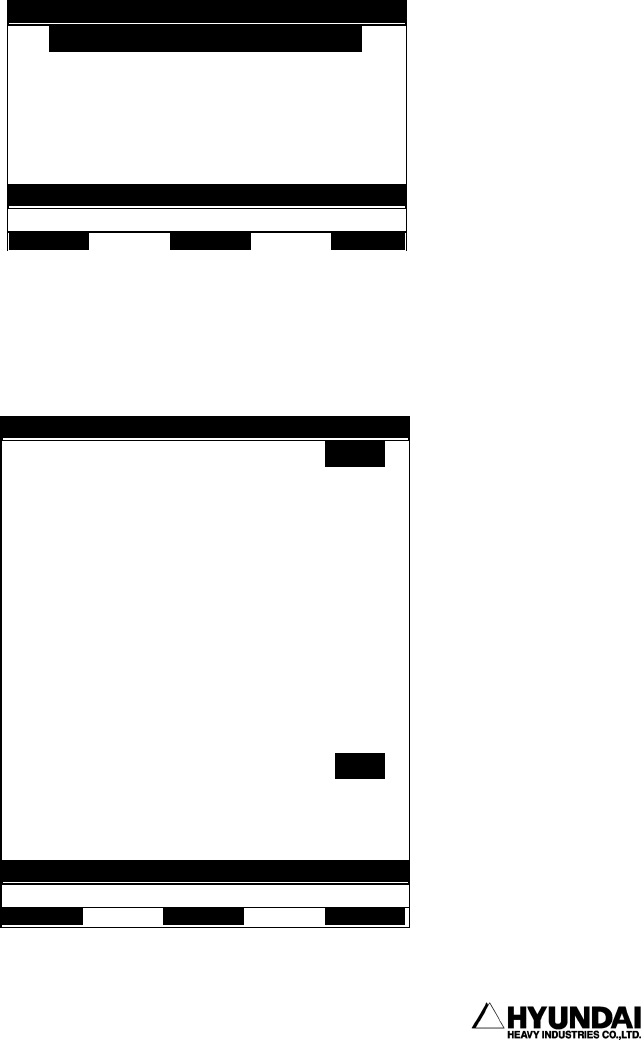
14:39:38* Servo Gun Parameter * A:0 S:4
1: First(1) servo gun parameter
2: Second(2) servo gun parameter
Use
[
Number
]/[
U
p][
Down
]
and
p
ress
[
SET
]
.
>
Previous Next
14:39:38** Servo Gun 1 Param.**A:0 S:4
Large stroke (mm) = [ 90]
Small stroke (mm) = [ 20]
Move tip clearance (mm) = [ 10.0]
Fix tip clearance (mm) = [ 2.0]
Max tip consumption (mm) = [ 10.0]
Tip change consumption (mm) = [ 6.0]
Gun arm bent offset (mm) = [ 0.00]
Gun arm bent per 100Kgf (mm)= [ 0.31]
Fix tip bent rate (%) = [ 100]
Pressure match rate (%) = [ 5]
Pressure fault check time(s)= [ 3.0]
----------------------------------------
Max move tip consumption(mm)= [ 0.0]
Max fix tip consumption (mm)= [ 0.0]
Move tip change consumption = [ 0.0]
Fix tip change consumption = [ 0.0]
Enter number and
p
ress
[
SET
]
>
Previous Next Complete