



















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 36
Introduction
It makes shift amount to palletize by using the data that recorded in palletizing pattern
register.
Note
(1) Set up Gun 2 as Palletizing in the menu of "System"[PF2] → 5.Initialize → 4.Set up
Using item
(2) Always conform the data of palletizing pattern register ("System"[PF2] →
5.Initialize→ 3.Palletizing → 1. Palletizing Pattern register) before using this function.
If using wrong data, robot could not work properly.
(3) This function works only in the step where the condition is PS.
(4) This function(M96) must be one pair with Palletizing End(M97)
11.3.17 PALEND Command
Introduction
It is a function to end palletizing. If this function runs, robot would initialize shift
amount and transmit specified signal to transfer a pallet.
11.3.18 PALRST Command
Introduction
It is a function to reset palletizing by force. If the specified signal is input, robot
would initialize all of informations and transmit a specified output signal to transfer a
pallet.
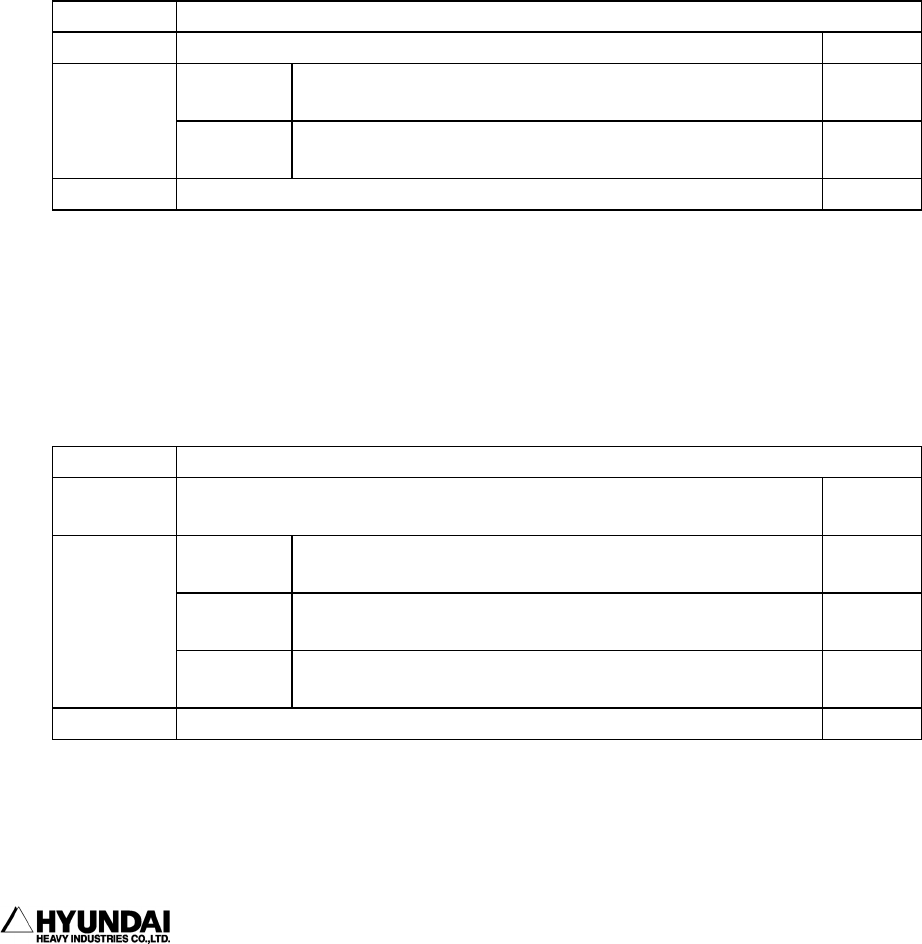
Description Exits the palletize (Data Input) (M97)
Syntax PALEND P=<Pallet number>, ES=<ending signal>
Pallet
number
Pallet number to exit 1∼16
Parameter
Ending
signal
the output signal (DO) to be transmitted after ending
palletizing. If 0, there is nothing transmitted.
DO range
example PALEND P=1, ES=81
Description Palletize reset (Data Input) (M98)
Syntax
PALRST P=<Pallet number>, CS=<Condition signal>,RS=<Response
signal>
Pallet
number
Pallet number 1∼16
Condition
signal
Input signal to receive when reset palletizing by force.
If 0, reset unconditionally.
DI range
Parameter
Response
signal
Output signal to respond to forced reset DO range
example PALRST P=1, CS=1, RS=5