



















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 38
11.3.20 SELCRD Command
Introduction
It is a function to select a base coordination to shift. Robot shifts in the base of selected
coordination.
Generally shift is executed in the base of robot coordination but robot could execute shift
in base of user coordination by using SELCRD command when shift data is transmitted in the
form of user coordination.
After this function is executed, all of shift is in the base of selected coordination. So
you must select "0" coordination to return to robot coordination.
(1) This function can not change the coordination of "tool coordination shift" in the base
of tool coordination.
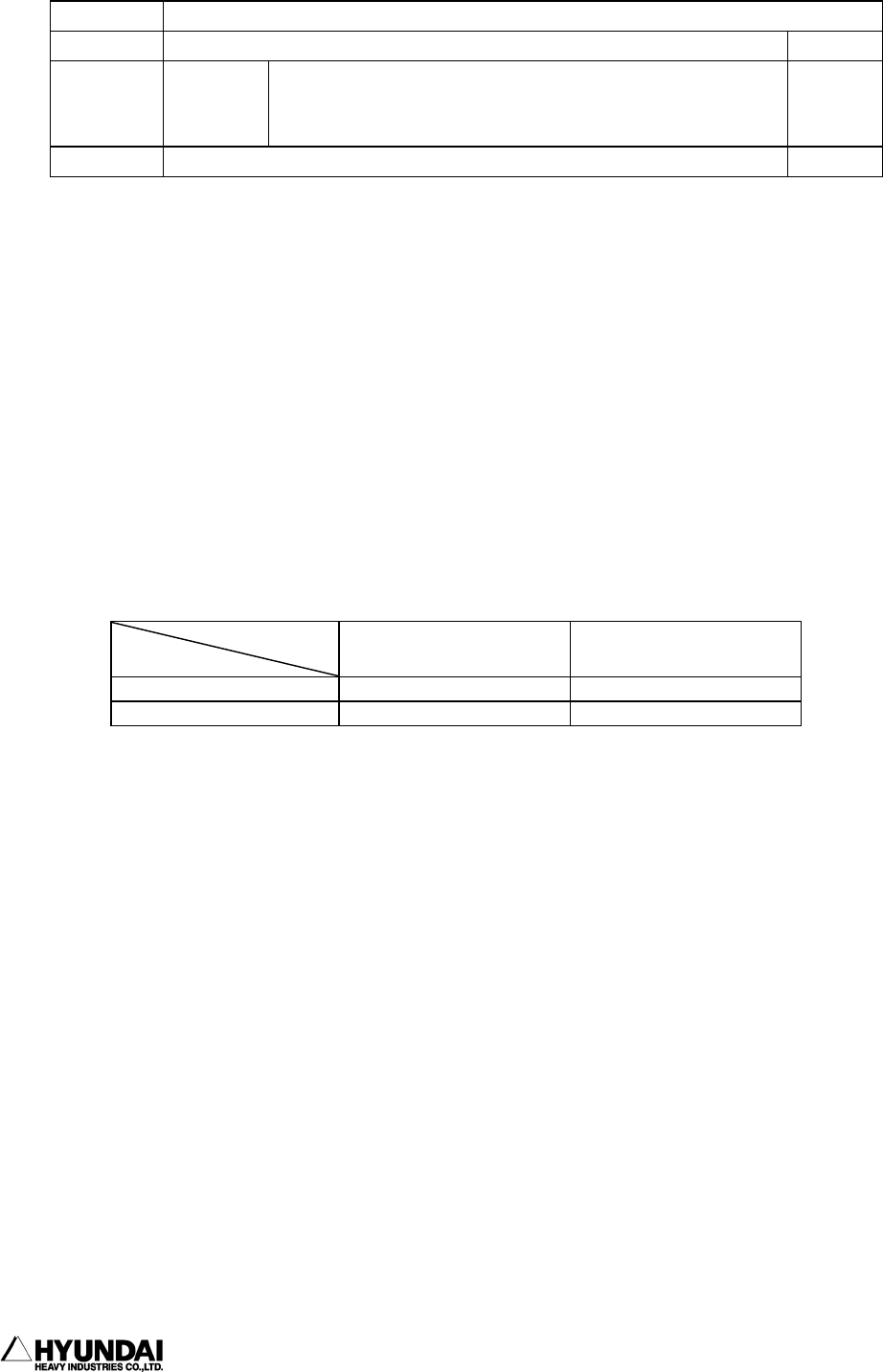
▶the result of SELCRD in various conditions
(2) Shift coordination would be changed at the next step that this function is recorded.
(3) SELCRD function can be applied to the following functions
· SONL (M52) on-line shift
· TONL1 (M53) & TONL2 (M54) on-line coordination transformation
· SXYS (M58) XYZ shift
· SEA (M59) search
· PAL (M96) palletizing (data input)
(4) There are referent functions such as "SYSTEM[PF2] → 2. CONTROL PARAMETER → 12. RECORD
COORDINATION → 1. RECORD USER COORDINATION" and "SET UP CONDITION[PF5] → 8. SELECT USER
COORDINATION"
Description Shift coordinate system selection (M113)
Syntax SELCRD <Coordinate System Number>
Parameter
Coordinate
System
Number
Coordinate System Number to be used among the user
coordinate systems.
0∼10
example SELCRD 4
Coord. No.
base
0 1 ∼ 10
Ground(robot coord.) Robot coord. shift User coord. shift
Tool(Tool coord.) Tool coord. shift Tool coord. shift