



















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 35
11.3.15 PALPU Command
Introduction
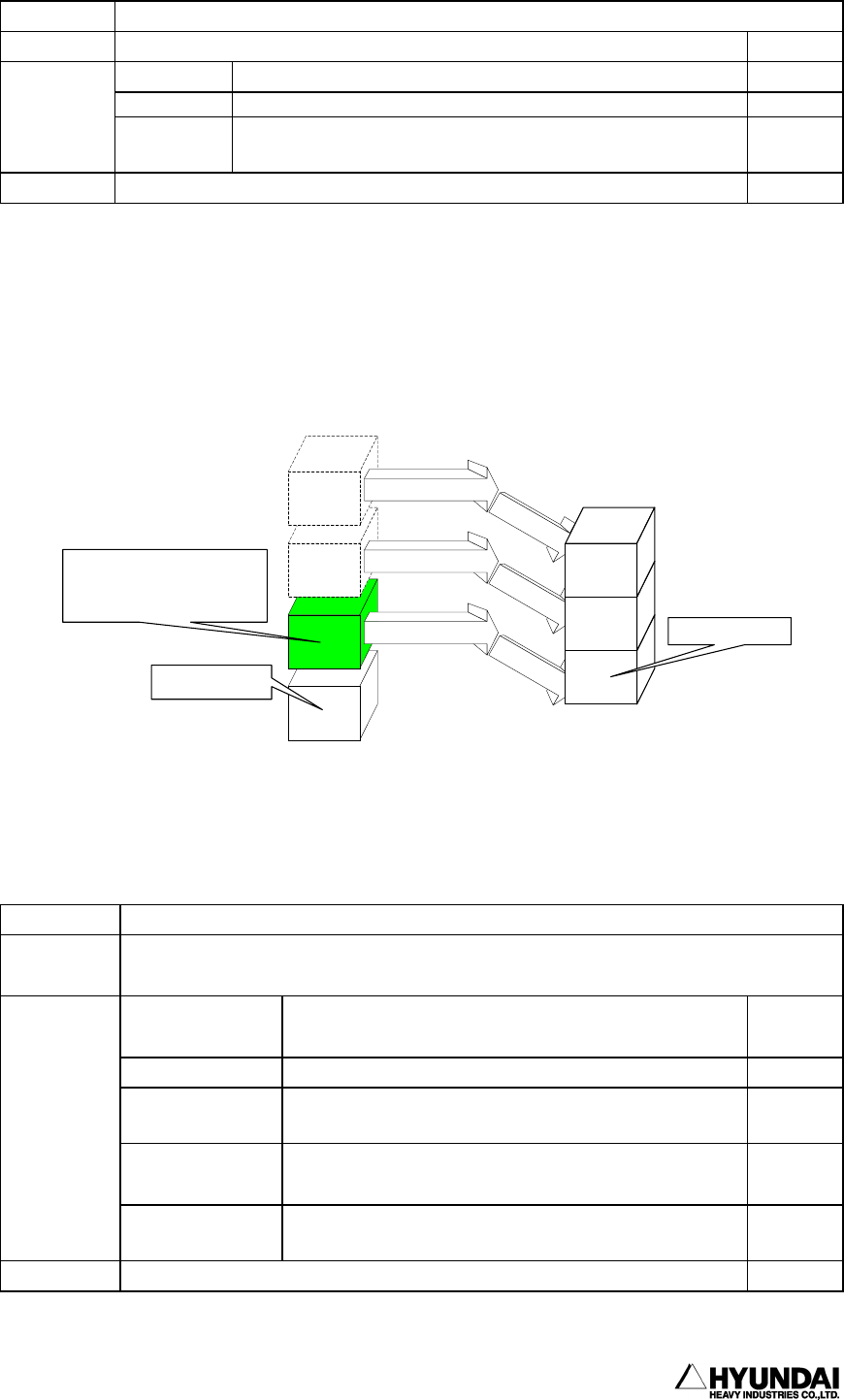
It is a function to shift the position where robot picks up the workpiece after gripping.
Robot can take a optimum path according to the change of loading height by using this
function.
Note
(1) This function must be between PAL and PALEND.
11.3.16 PAL Command
Description Palletizing picking up shift (M95)
Syntax PALPU P=<Pallet No>,SL=<Start level>,SH=<shift amount>
Pallet No Pallet number 1∼16
Start level the level to
p
ick u
p
(1-base) 1∼100
Parameter
Shift amount shift amount when picking up
-2000.0∼
2000.0
Example PALEND P=1,SL=4,SH=1000
Pickup point
Destination point
Picking up shift
Description Palletize (Data Input) (M96)
Syntax
PAL P=<Pallet No>, PR=<Pattern register No>, W=<Workpiece size>, L=<Workpiece
size>, H=<Workpiece size>
Pattern Number Palletize number 1∼16
Pattern Number Palletize pattern register number 1∼16
Workpiece
size(W)
width of workpiece
0.1∼
3000.0
Workpiece
size(L)
length of workpiece
0.1∼
3000.0
Workpiece
size(H)
height of workpiece
0.1∼
3000.0
example PAL PAL P=1, PR=1, W=500, L=300, H=250.5