



















2. Basic operation
-----------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
2 - 7
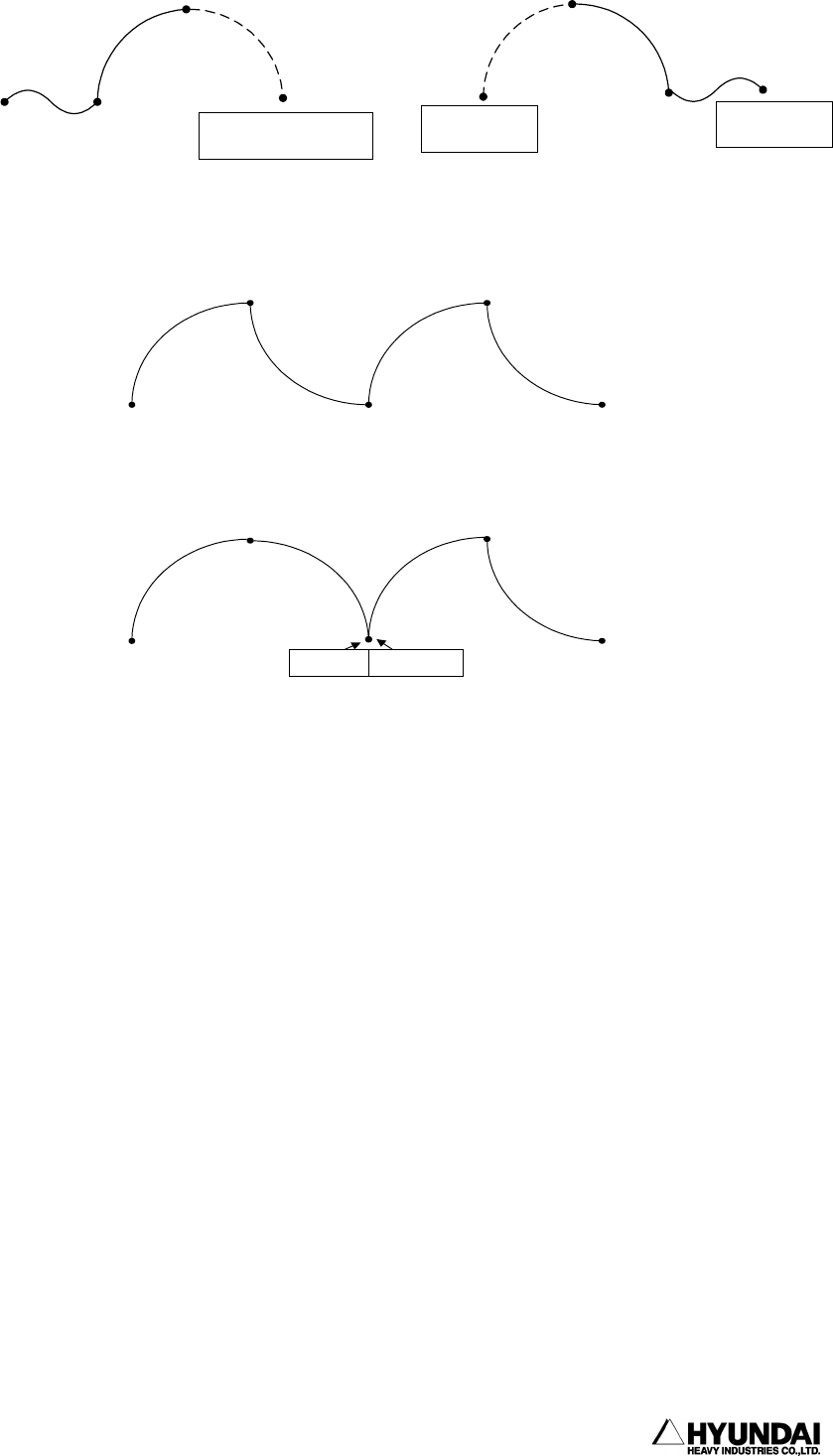
If you use the above explanation's standard, you can do programming using double
registration of same point even in case of continuous circle.
Like this, you can make program whatever your want. if your use double registration and
decide the interpolation type of step considering the locus form to be made.
2.2.1.2 Pose
It is the parameter to record robot's position. In case of input of [MOVE] sentence using
[CMD] key, you have to user pose parameter surely. In case of input of [MOVE] sentence pressing
[REC] key, pose is not shown (hidden pose). In this case, the robot's position would be recorded
as soon as you press [REC] key.
Pose : (X, Y, Z, Rx, Ry, Rz, Cfg) {coordinate system}
{coordinate system} : ' ' = Base coordinate system
R = Robot coordinate system
E = Encoder
Shift : (X, Y, Z, Rx, Ry, Rz) {coordinate system}*) R1∼R8 is same as in-line resister.
{coordinate system} : ' ' = Base coordinate system
R = Robot coordinate system
T = Tool coordinate system
Setp n+1: C Int.
Setp n
Step n+2: C Int.
Ref. step
Object step
Step n+1: C int.
Step n: Start step
Step n+2
Int.: L or P
Object step
Start step
Setp n-1
Ref. step
Int. C
Int. C
Int. C
Int. C
Int. C
Int. C
Int. C
Int. C
Int. L(P)
Double registration of
same point