



















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 26
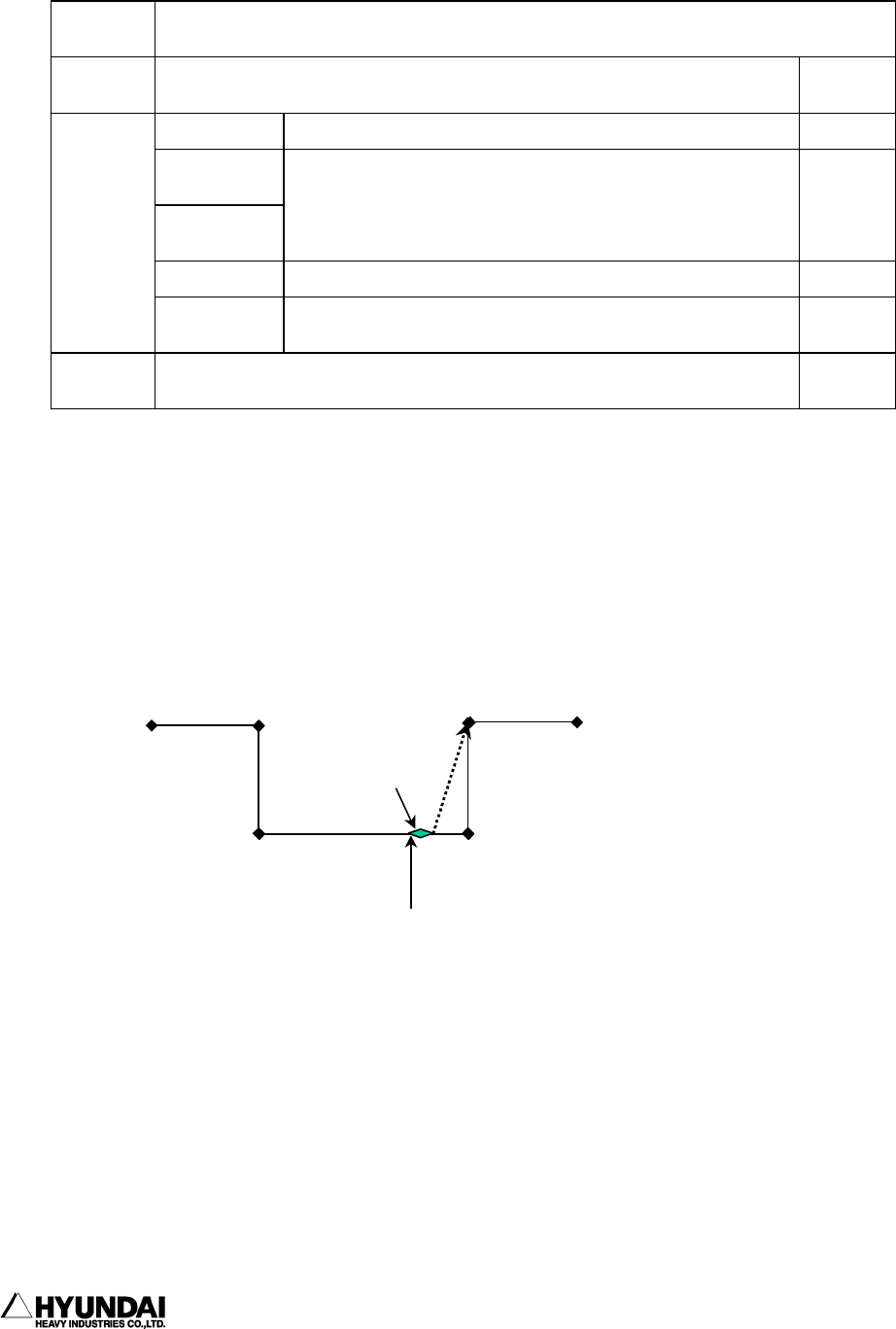
11.3.2 RINTA Command
Introduction
If input voltage is satisfied fixed voltage range by using analog sensor, robot will
regard as arriving to the next step.
Example
Descri
ption
Robot Interrupt(Analog signal) (M30)
Syntax
RINTA PT=<Port No>,VL=<Lower volt>,VH=<Upper volt>
,RF=<STD>,X=<X coord>,Y=<Y coord>, Z=<Z coord>
Port No. Analog port No. receiving interrupt signal 1∼4
Lower volt
Upper volt
if the value of analog is between lower and upper
volt, interrupt occurs.
-10.0
∼10.0
STD 0 is off, 1 is On 0∼1
Parame
ter
X,Y,Z
coord
Used at search function
-3000.0
∼3000.0
Exampl
e
RINTA PT=<Port No>,VL=<Lower volt>,VH=<Upper volt>
,RF=<STD>,X=<X coord>,Y=<Y coord>, Z=<Z coord>
S1 S2
S3
F001:M30[1,1.00,3.00,0,0,0,0]
S4
S5 S6:End
Option board
Deceleratin point
Analog1 Voltage
: 2.00V