



















3. Service menu
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
----------------------------------------------------------------------------------------
3 - 64
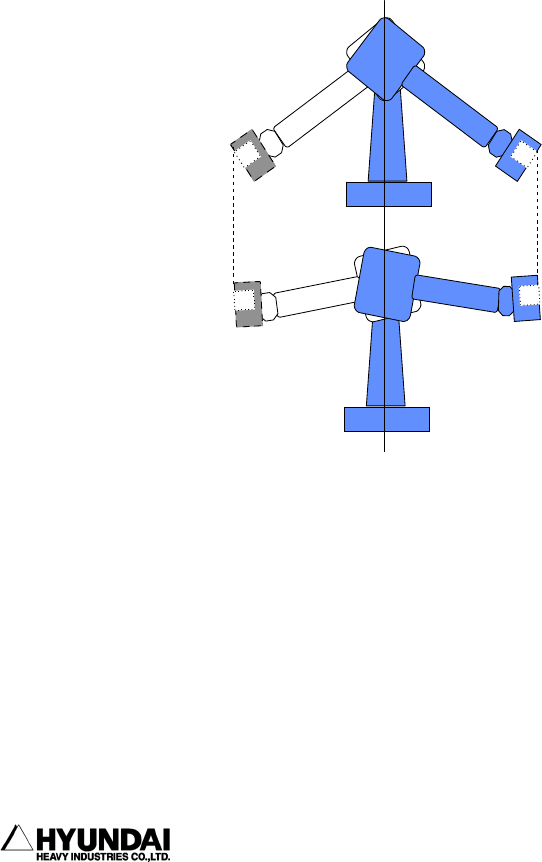
3.6.2 Mirror Image
Outline
It makes the program with the position data that is the symmetry toward to the plane
passing through the line straight line being made by the S axis reference position of
the robot when a certain robot program is given. It makes a new program that is symmetry
to the position of wrist axis and the position of S-axis on the center of Y-Z plane
to the position of 0° axis of the robot.
Example
This function makes the best use in the work, request to the same movement for the two
robots in the right and left side. At this time, at first it teaches the work for the
one robot not the right side or left side, if it executes to transfer the program by
the mirror image.
[ Original Program → Mirror Image Transferred Program]