



















6. System setting
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
6 - 83
6.4.2 Arc
Outline
It sets a function to do the arc welding.
Please refer to the "Operation manual on the HR controller" for the precise contents.
Screen display
Reference
The arc condition parameter is taken in custody in the control constant file
(ROBOT.C00).
It can be changed in case that the control constant file (ROBOT.C00) is completely
taken in custody.
6.4.2.1 Condition parameter
Outline
It sets a variety of condition for the welding work in the arc welding.
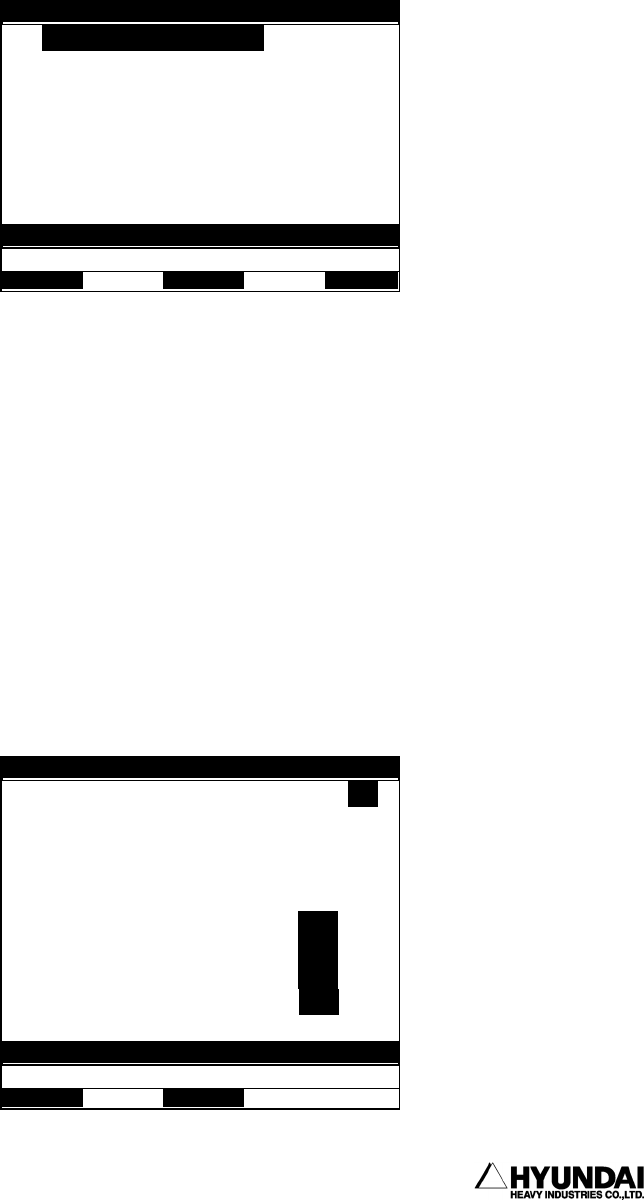
Screen display
14:39:38 *** Arc Weld *** A:0 S:4
1: Condition Parameter
Use
[
Number
]/[
U
p][
Down
]
and
p
ress
[
SET
]
.
>
Previous Next
14:39:38 ** Arc Weld ** A:0 S:4
1: Fast step Go/Back = Max.speed*[ 1]%
2: Inching Spd: Slow=[ 1]%,Fast=[ 1]%
3: Assign Welding Current Port =[ 0]
4: Assign Welding Voltage Port =[ 0]
5: Assign [ARC On] state output =[ 0]
6: Welder error input =<DSBL,ENBL>
7: Welding wire state =<DSBL,ENBL>
8: Shield Gas state =<DSBL,ENBL>
9: Feeder Ty=(Motor & Dir.)=<DSBL,ENBL>
10: Gas Postflow at weld stop =[ 0.0]sec
Enter number and
p
ress
[
SET
]
>
[
1 - 25
]