


















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 44
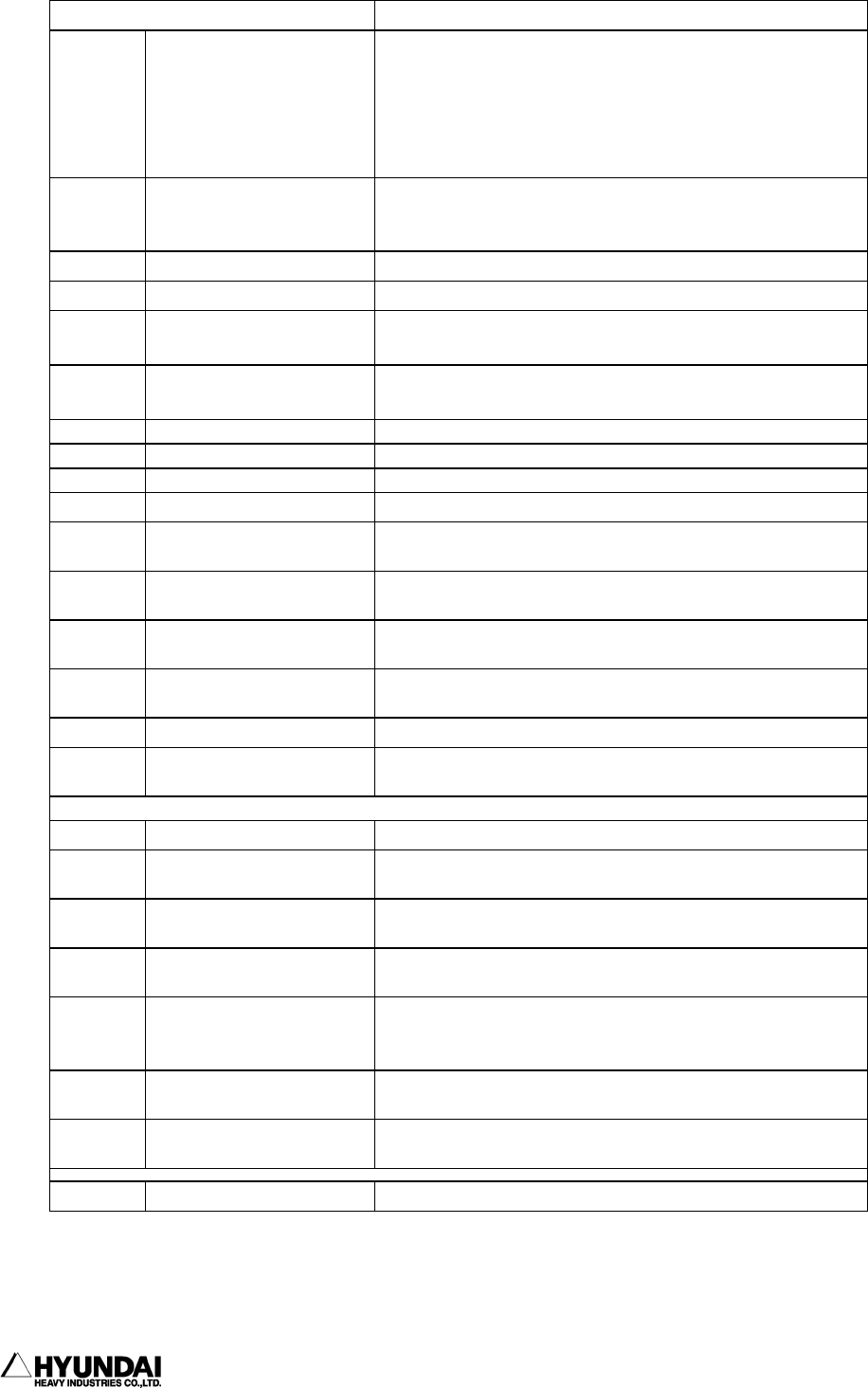
M I T Function Code Example of corresponding HR - BASIC syntax.
M86
Function Jump (Count
Conditional)
Vp%=Vn%/<Division Count> or Vp%=Vn% MOD <Division
Count>
value is initialized out of cycle).
ON Vp%+1 GOTO <Address1><Address2><Address3>...
M87
Function Jump (I
Conditional)
Vn% = DIn2*2^2 + DIn1*2 + DIn0
ON Vn%+1 GOTO <Address1><Address2><Address3>...
M88 Function Jump Exit Not required
M92 END END
M94
Call Insert sheet
program
TIERST R=1,P=4,PR=2,TP=800
M95
Palletizing picking up
shift
PALPU P=1,SL=4,SH=1000
M96 Palletizin
g
shift PAL P=1
,
PR=1
,
W=500
,
L=300
,
H=250.5
M97 Palletizin
g
end PALEND P=1
,
ES=81
M98 Palletizin
g
reset PALRST P=1
,
CS=1
,
RS=5
M99 Comment Function 'SPOT WELD or REM SPOT WELD
M101 String Output (RS-232C) PRINT #1,“ <String>”
M102
Other Program Call
(Uncond.)
CALLPR
M103
Other Program Call (I
Cond.)
Use IF instruction
M104
Other Program Call
(Count Cond.)
Use IF instruction, and variable value increment
M105 Output Signal(ON/OFF) DOn=1 or DOn=0
M113
Shift Coordinate System
Selection
SELCRD
I1∼24 Signal Wait WAIT DIn=1
I25
I Signal Wait (Input
Si
g
nal Settin
g
)
WAIT DIn=1
I26
I Signal Wait (Sub-Logic
Si
g
nal)
WAIT DIn=0
I52
Time Conditional I
Si
g
nal Wait
WAIT DIn=1,<Wait Time>,<shelterAddress>
I53
Time Conditional IB
Signal (AND)
WAIT (GIn AND <Binary Condition>)=<Binary Condition>,
<Wait Time> , <shelterAddress>
I54
Time Conditional IB
Si
g
nal (OR)
WAIT GIn AND <Binary Condition>, <Wait Time>,
<shelterAddress>
I55
Time Conditional IB
Si
g
nal
WAIT GIn=<Binary Condition>, <Wait Time>,
<shelterAddress>
T Delay Time Setting DELAY <Delay Time>