



















8. Programming
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
8 - 11
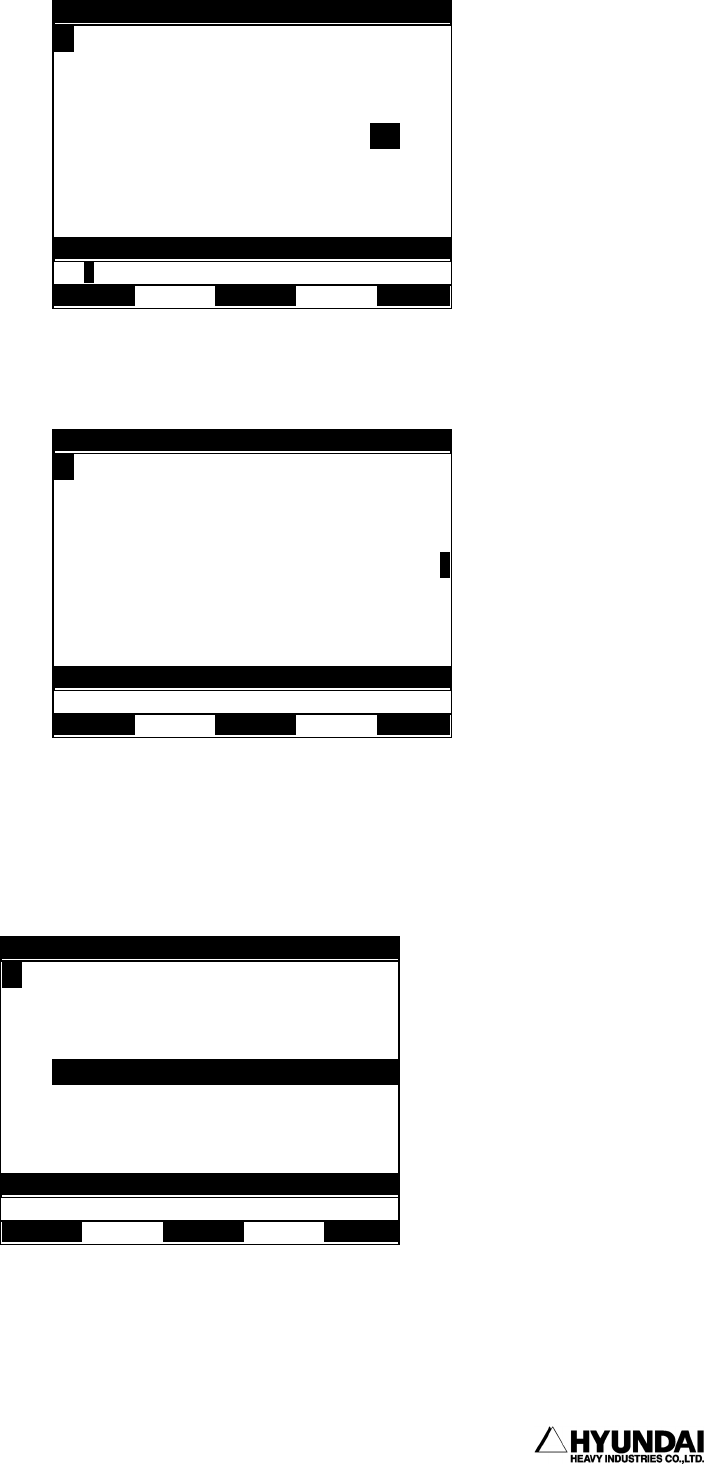
[1] [SET] [Ö] [Ö] - Inputting accuracy. (H=0 ; Same method with Tool number
input) Move to MX.
< MX > < G1 > [SET] - <MX>, <MX2>, <G1>, <G2>, <BM>. multi inputs
possible.
[CANCEL] - Transfer from word cursor mode to statement cursor mode.
[SET] - Transfer to statement cursor mode.
Input completed.
14:39:38 *** M A N U A L *** A:0 S:H4
T0
PN:999[*]__ S/F:1/0 Sp:100.00
Robot:H6 , 6axes, 2steps
S1 MOVE L,P3+R[2],S=120mm/sec,A=0,H=0>
Enter accurac
y
(
0-3
)
>A=0
Variable Ex
p
r.
14:39:38 *** M A N U A L *** A:0 S:H4
T0
PN:999[*]__ S/F:1/0 Spd:100.00
Robot:H6 , 6axes, 2stpes
S1 OVE L,P3+R[2],S=120mm/sec,A=1,H=0,_
Ad
j
ust out
p
ut o
p
tion
(
To
gg
le
)
>
MX MX2 G1 G2 BM
14:39:38 *** M A N U A L *** A:0 S:H4
T0
PNo:999[*]__ SNo/F:1/0 Spd:100.00
Robot:H6 , 6axes, 2steps
S1 MOVE L,P3+R[2],S=120mm/sec,A=1,H=0>
Select PF menu
>
MOVE
,
I
/
OFlowCtrl Etc. ARC Weld Assi
g
n