



















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 8
11.1.6.3 Input/output variable
Reference
(1) When you use index as a type of numerical type, write it in [] like DO[], GO[], AO[].
(2) The range of analog input/output value is -12V∼12V when it is based that BD480 is
equipped.
11.1.6.4 System variable
These are variables to get or to set the information of inner system. In present, there are
variable which is relevant to number of times register and two read only variables which are
relevant to option board.
Read only variable is not substituted. It means that it can't be located in left side of the
substitutional statement.
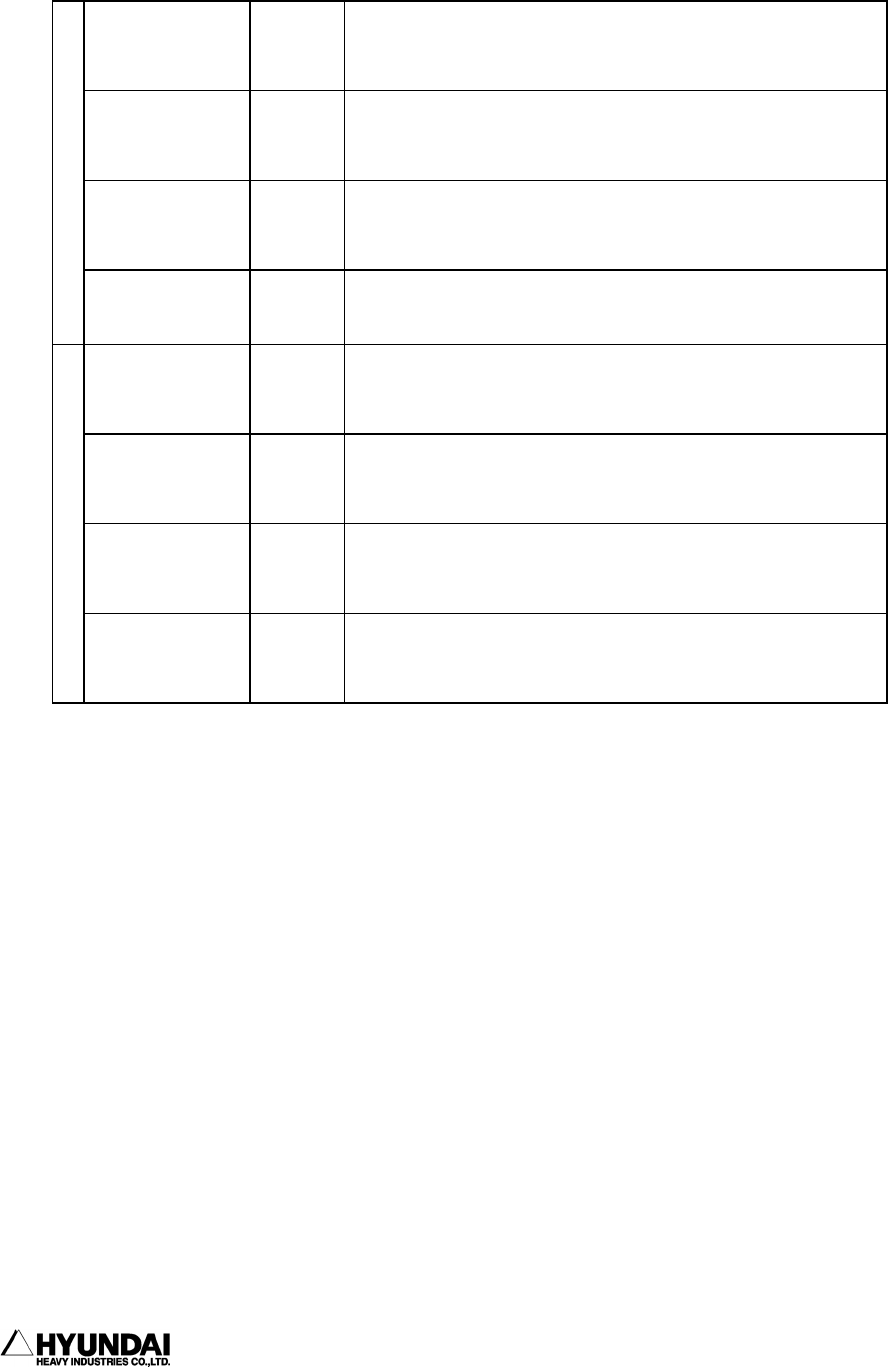
single general
output
DO (bit)
DO1∼256
DO2=1 (If 0, RESET, If not 0, SET)
(SET general output signal DO2)
group general
output
GO (byte)
GO1∼32
GO3=&B00001111 or GO3=&H0F
(Output 0F(HEX) through GO3)
single dedicated
output
SO (bit)
SO1∼8
SO4=0 (if 0, RESET, if not 0, SET)
(RESET dedicated output signal SO4)
ou
tp
ut
va
ri
ab
le
analogue
AO
AO1∼4
AO1 = 3.5
(output 3.5 V through analog No. 1 output channel)
single dedicated
input
DI (bit)
DI1∼240
V2%=DI3 (it becomes 1 or 0, read only variable)
(Set present status of general input signal DI3 to
V2% variable)
group general
input
GI (byte)
GI1∼30
V3%=GI4 (0∼255, read only variable)
(Set present status of group general input signal GI4 to
V3% variable)
single dedicated
input
SI (bit)
SI1∼8
V3%=SI4 (It becomes 1 or 0, read only variable)
(Set present status of dedicated input signal to V3%
variable)
in
pu
t
va
ri
ab
le
analogue
AI
AI1∼4
V3!=AI2 (read only variable)
(Substitute input channel value of analog No.2 to %V3!
variable)