



















9. Quick Open Function
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
9 - 4
9.2 MOVE - step position
Outline
Press
(QuickOpen) key at move instruction.
Screen display
screen contents
present step position
(1) It displays relevant step position(pose).
(2) When changing a step position, it is moved by using a cursor key, when it is edited,
if [SET]key is pressed after inputing number, the contents input is reflected.
coordinate type : It selects the display type of present step position among Base
coordinate system, Robot coordinate system and Encoder value.
robot config. type : It is displayed when the coordinate system form is Base or Robot
coordinate system, and when the robot position is decribed, if you decribe the form
uniquly, the selection of robot config. is needed because there are several values
considering of its mechanism. In case of selecting the items, press [Shift(high
speed)]+[<-] [->].
Edit method
Move the highlight bar on the item. In case of inputting the numerical value, if you
press [SET] key after inputting number on the input frame, the contents will be reflected.
In case of selecting one out of items in < >, if you press [Shift(high speed)]+[<-][->],
the highlight bar is moving and then it is immediately reflected. If you want to reflect
it to program, you finish it by pressing “ record” [PF5]. If you finish by pressing
[cancel], the contents displayed on the screen is not reflected.
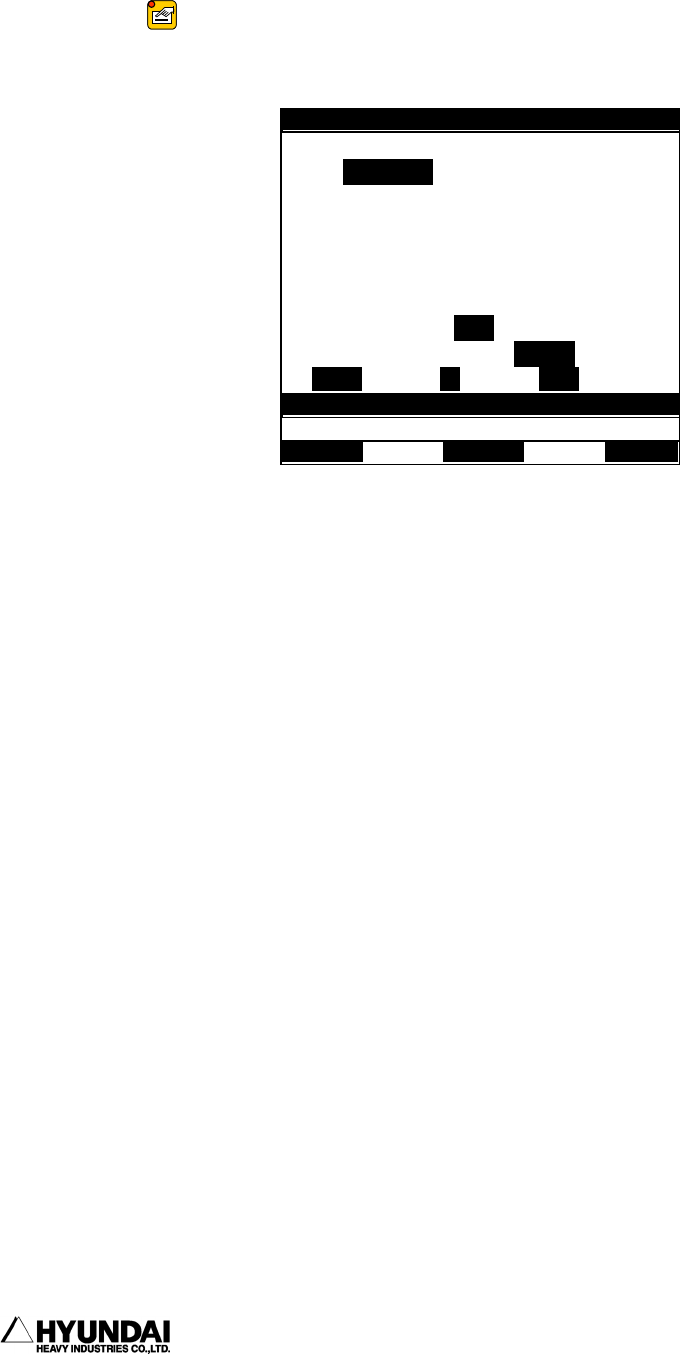
14:39:38 *** Ste
p
Pose Data *** A:0 S:4
POSE OF CURRENT STEP
X: [ 840.000] mm
Y: [ 960.000] mm
Z: [ 0.000] mm
Rx:[ 0.000] deg
Ry:[ 0.000] deg
Rz:[ 0.000] deg
Coordination : <Base,Robot,Encoder>
Robot Configuration: <Define,Self-Cfg>
<Front,Rear> <Up,Down> <Flip,Non-flip>
Select and Enter number. Press
[
SET
]
>
[
-99999.999 - 99999.999
]
Save