



















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 37
11.3.19 CALLPR Command
Introduction
In case that a robot is handling same workpieces that have a different position or
repeating identical action, there are specific repeated actions.
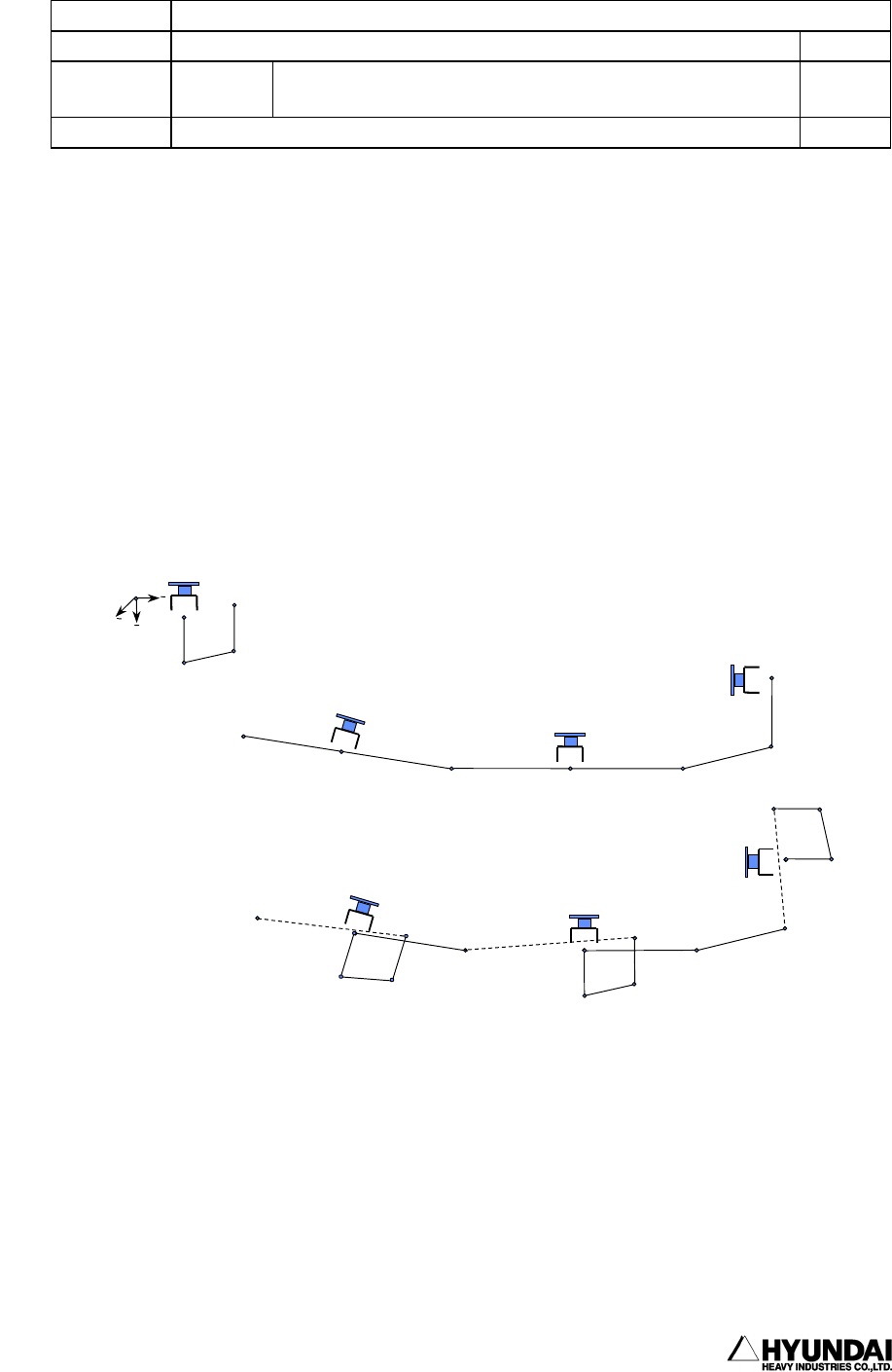
CALLPR(Call relative program) is used in such case that relative position and
direction are same but absolute position is different. You could program the
specific programs as one program and call to use it if there is a need.
There is a different point that called program is run in the base of that current
position and direction when the program is called compared to just CALL PROGRAM.
You could the result that program No.1 called relatively No.2 as following picture.
Note
When called program is finished, robot executes the next step or function after returning
to calling program
Description Calls other program (Unconditional) (M102)
Syntax CALLPR <Program Number>
Parameter
Program
Number
Program number to be called. 1∼999
example CALLPR 2
Program1
Playback of Program1
Program2
RS1
RS2
RS3
RS4(END)
a
o
n
S1
F1:M102[2]
S6
S7(END)
S5
S4
S3
S2
F1:M102[2]
F1:M102[2]
S6
S7(END)
S5
S4
S3
S2
S1
RS1
RS2
RS3
RS4(END)
RS1
RS2
RS3
RS4(END)
RS1
RS2
RS3
RS4(END)