



















2. Basic operation
-----------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
2 - 5
2.2 Basic things for step
Step is a word indicating robot's certain position (or tool's end position).
Robot basically, move to other step from this recorded step and carry out any other function.
Move command "MOVE" is a command language instructing robot's moving and it is a most basic
command language in the robot programming. The position of tool end is recorded also various
item such as speed, interpolation, accuracy are designated.
2.2.1 The parameter of STEP command line
MOVE L
,
P1
, S=100%, A=0, T=0,
G1, MX1,
UNTIL I4, V1%
| | | | | | | +- (8) Stop status
| | | | | | +- (7) Stop condition
| | | | | +- (6) Output(Spot), BM(block mark)
| | | | +- (5) Tool no. : 0∼3
| | | +- (4) Accuracy : 0∼3
| | +- (3) Speed ( Unit : mm/sec, cm/min, %, sec )
| +- (2) Pose(X,Y,Z, Rx,Ry,Rz, Cfg){Coord.} + shift(X,Y,Z, Rx,Ry,Rz){Coord.}
+- (1) interpolation : P(interpolation Off), L(liner), C(circular)
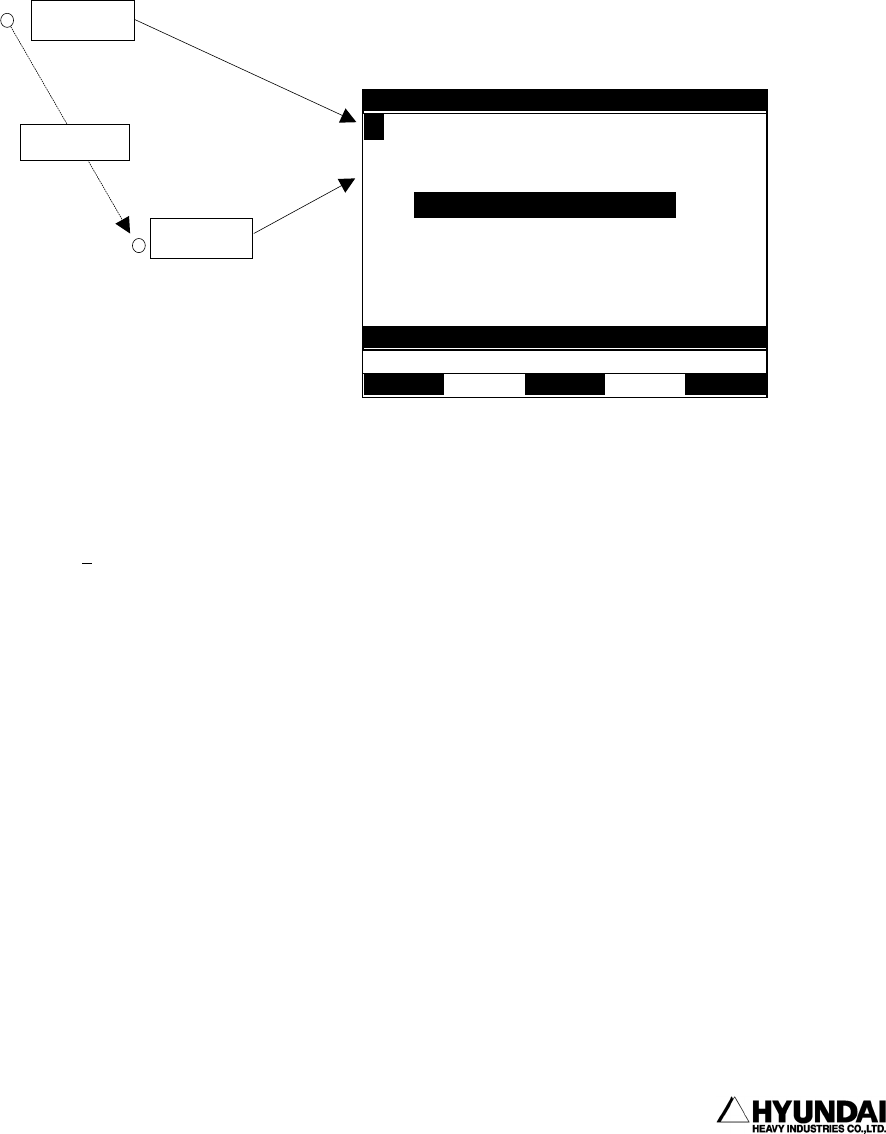
14:39:38 *** M A N U A L *** A:0 S:4
T0
PNo:999[*]__ S/F:1/0 Spd:100.00
Robot:H6, 6axes, 2steps
S1 MOVE P,S=100mm/sec,A=0,T=0
S2 MOVE L,S=100mm/sec,A=0,T=0
Select PF menu
>
Service S
y
stem Rel.WAIT Cond Set
STEP
STEP
Manipulator