



















2. Basic operation
-----------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
2 - 12
If the robot composition style is not set, the screen will be displayed as follow.
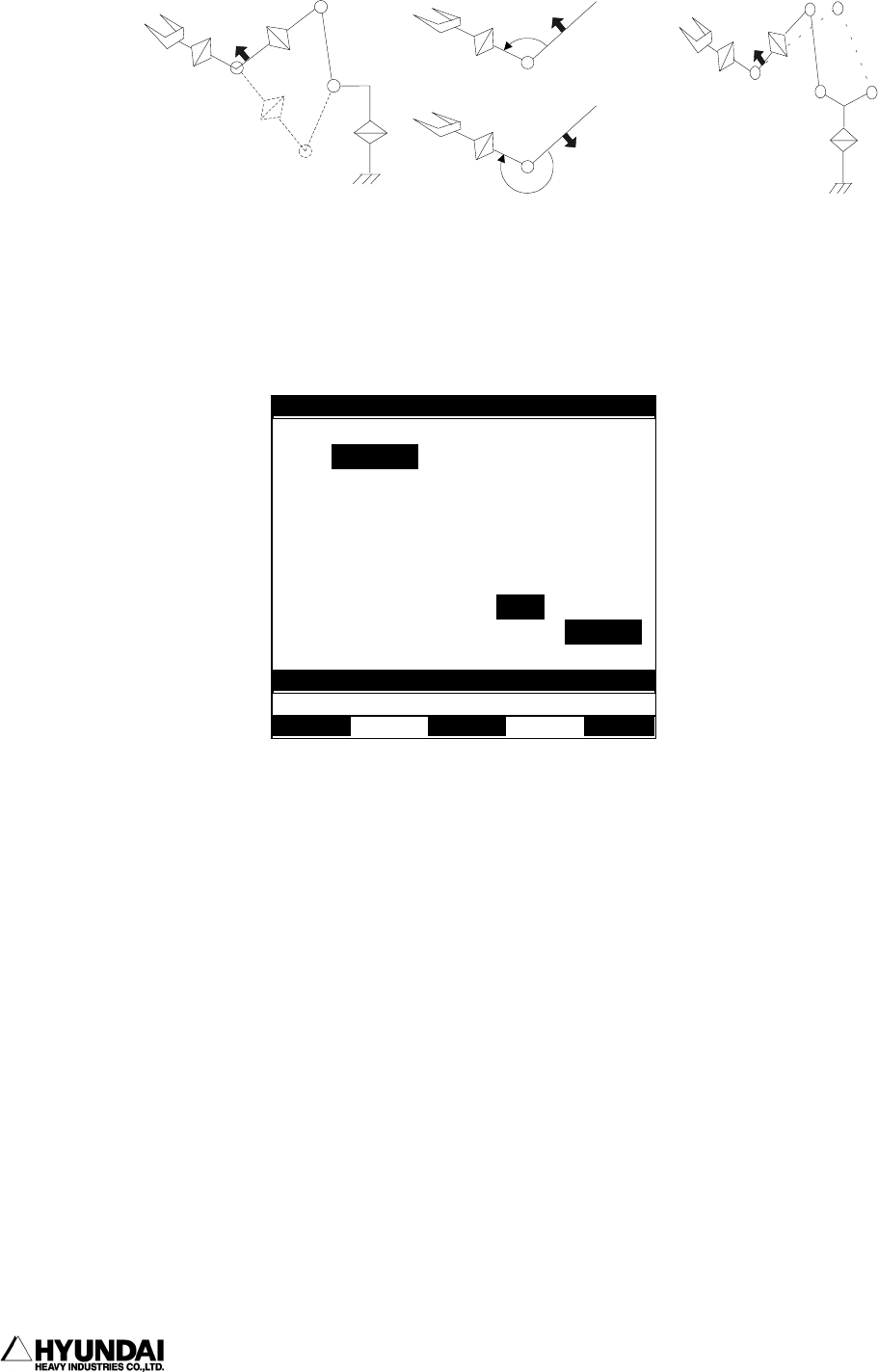
UP
DOWN
FLIP
NONFLIP
ARM
WRIST
RIGHTY
LEFTY
14:39:38 *** Ste
p
Pose Data *** A:0 S:4
POSE OF CURRENT STEP
X: [ 50.000] mm T1: [ 0.000] mm
Y: [ 880.000] mm T2: [ 0.000] mm
Z: [ 1020.000] mm T3: [ 0.000] mm
Rx:[ -90.000] deg
Ry:[ 0.000] deg
Rz:[ 0.000] deg
Coordination : <Base, Robot,Encoder>
Robot Configuration: <Define,Self-Cfg>
Select and Enter number. Press
[
SET
]
>
[
-99999.999 - 99999.999
]
Save