



















6. System setting
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
6
- 90
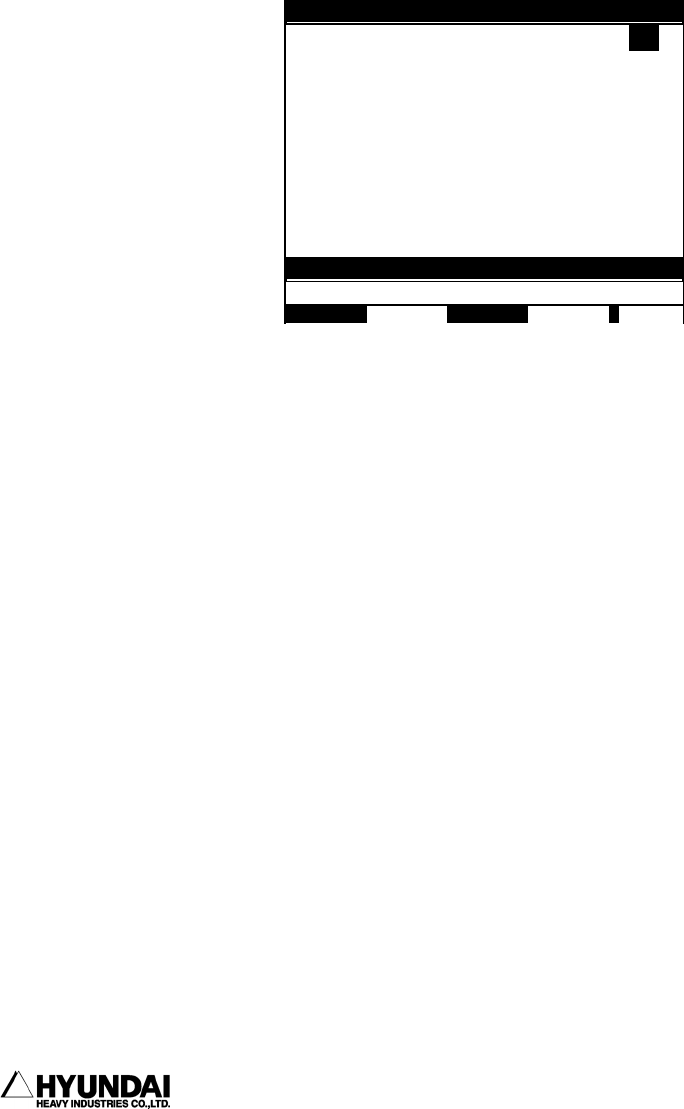
6.4.3.2 Palette dip angle measurement
Outline
It is a function that can measure the dip angle easily by making out the teaching
program separately for the Palette dip angle which is difficult to measure physically
in the workshop.
Screen display
Contents of the screen
Palette dip angle measurement program number : It inputs the program number made out
to measure the dip angle.
Palette basis step number : It records the position step that the palette and the initial
work object are to be put.
Palette X direction record step number : It records the step in the direction of X
axis.( robot coordinate system basis )
Palette Y direction record step number : It records the step in the direction of Y
axis.( robot coordinate system basis )
14:39:38 ** Pallet slo
p
e ** A:0 S:4
Pallet slope teaching program =[ 1]
Palletize base step number =[ 1]
Palletize Rec.Posi(X Direct.) =[ 1]
Pallet Rec.Posi(Y Direct.) =[ 1]
Enter number and
p
ress
[
SET
]
>
[
1 - 999
]