



















721
Chapter 34 CAN Controller
3.Functional Description
Automatic Retransmission mode is enabled by setting the bit DAR in the CAN Control Register to one. In this
operation mode the programmer has to consider the different behaviour of bits TxRqst and NewDat in the
Control Registers of the Message Buffers:
When a transmission starts bit TxRqst of the respective Message Buffer is reset, while bit NewDat remains
set.
When the transmission completed successfully bit NewDat is reset.
When a transmission failed (lost arbitration or error) bit NewDat remains set. To restart the transmission the
CPU has to set TxRqst back to one.
3.4 Test Mode
The Test Mode is entered by setting bit Test in the CAN Control Register to one. In Test Mode the bits Tx1,
Tx0, LBack, Silent and Basic in the Test Register are writable. Bit Rx monitor the state of pin CAN_RX and
therefore is only readable. All Test Register functions are disabled when bit Test is reset to zero.
3.5 Silent Mode
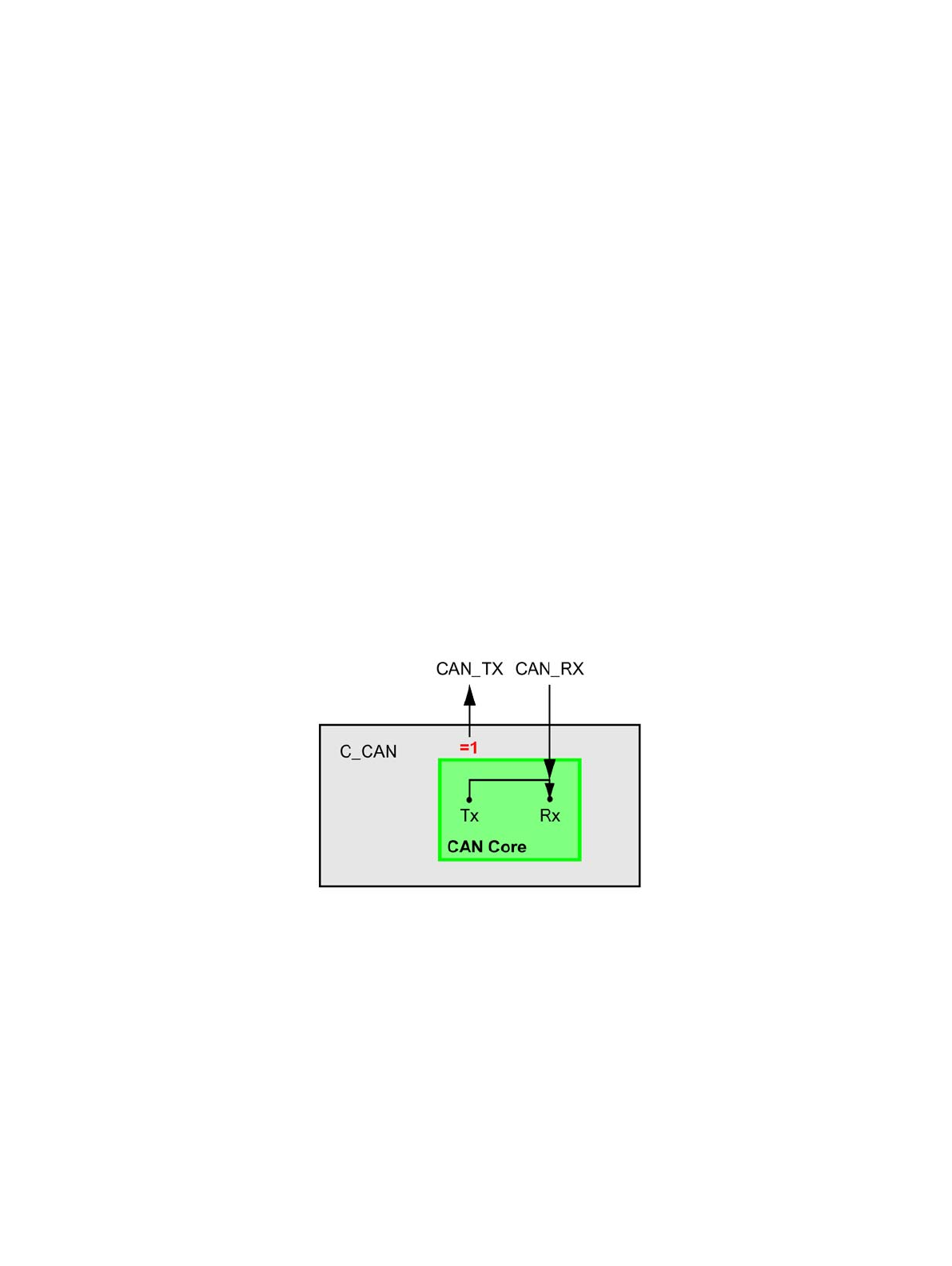
The CAN Core can be set in Silent Mode by programming the Test Register bit Silent to one.
In Silent Mode, the CAN is able to receive valid data frames and valid remote frames, but it sends only
recessive bits on the CAN bus and it cannot start a transmission. If the CAN Core is required to send a
dominant bit (ACK bit, overload flag, active error flag), the bit is rerouted internally so that the CAN Core
monitors this dominant bit, although the CAN bus may remain in recessive state. The Silent Mode can be used
to analyse the traffic on a CAN bus without affecting it by the transmission of dominant bits (Acknowledge Bits,
Error Frames). Figure 3-1 shows the connection of signals CAN_TX and CAN_RX to the CAN Core in Silent
Mode.
Figure 3-1 CAN Core in Silent Mode
In ISO 11898-1, the Silent Mode is called the Bus Monitoring Mode.
3.6 Loop Back Mode
The CAN Core can be set in Loop Back Mode by programming the Test Register bit LBack to one. In Loop
Back Mode, the CAN Core treats its own transmitted messages as received messages and stores them (if
they pass acceptance filtering) into a Receive Buffer. Figure 3-2 shows the connection of signals CAN_TX and
CAN_RX to the CAN Core in Loop Back Mode.